Une équation différentielle classique en Mécanique - Exercice 1
45 min
70
Il existe des équations différentielles "modèles" qui interviennent dans de très nombreux domaines. Cela signifie qu'il existe des comportements similaires dans de nombreux domaines des Sciences. En voici un exemple.
Question 1
On note par le temps, qui est le paramètre d'évolution en Physique classique. On a alors .
On considère l'équation différentielle suivante, qui modélise le comportement oscillatoire d'une quantité qui caractérise un système physique réel :
Dans cette équation différentielle linéaire, du second ordre, à coefficients constants, on a :
le terme caractérise l'amortissement temporel de , et est un réel strictement positif ;
le terme caractérise l'oscillation intrinsèque (on dit aussi propre) de , et est un réel strictement positif ;
le terme caractérise l'amplitude de l'excitation externe du système physique, et est un réel strictement positif ;
le terme caractérise l'oscillation externe du système (on dit aussi que c'est celle d'un opérateur extérieur), et est également un réel strictement positif.
Pour des raisons purement d'ordre physique, on admettra que lors de cet exercice :
Les deux {\color{blue}{\textbf{conditions initiales}}}, qui définissent le problème de \textit{Cauchy} considéré, sont les suivantes :
On adoptera la notation simplificatrice suivante :
On considère l'équation différentielle suivante, qui modélise le comportement oscillatoire d'une quantité qui caractérise un système physique réel :
Dans cette équation différentielle linéaire, du second ordre, à coefficients constants, on a :
le terme caractérise l'amortissement temporel de , et est un réel strictement positif ;
le terme caractérise l'oscillation intrinsèque (on dit aussi propre) de , et est un réel strictement positif ;
le terme caractérise l'amplitude de l'excitation externe du système physique, et est un réel strictement positif ;
le terme caractérise l'oscillation externe du système (on dit aussi que c'est celle d'un opérateur extérieur), et est également un réel strictement positif.
Pour des raisons purement d'ordre physique, on admettra que lors de cet exercice :
Les deux {\color{blue}{\textbf{conditions initiales}}}, qui définissent le problème de \textit{Cauchy} considéré, sont les suivantes :
On adoptera la notation simplificatrice suivante :
Déterminer le discriminant associée à l'équation caractéristique de l'équation différentielle, et précisez son signe.
Correction
Le discriminant , associée à l'équation caractéristique de l'équation différentielle, est :
Soit encore, avec l'hypothèse , l'expression suivante :
Soit encore, avec l'hypothèse , l'expression suivante :
Question 2
En déduire les expressions des racines de cette équation caractéristique.
Correction
Les expressions des deux racines et , complexes conjuguées l'une de l'autre, de cette équation caractéristique sont (avec ) :
En simplifiant :
Soit :
En simplifiant :
Soit :
Question 3
En déduire l'expression de la solution homogène, notée , de l'équation différentielle proposée.
Correction
L'expression de la solution homogène, notée , de l'équation différentielle proposée est :
Question 4
La solution particulière recherchée, notée , de l'équation différentielle proposée, sera choisie de la forme suivante :
Avec et qui sont deux nombres réels.
Déterminer l'expression de associée à notre problème, c'est-à-dire les expressions des deux coefficients réels et .
Avec et qui sont deux nombres réels.
Déterminer l'expression de associée à notre problème, c'est-à-dire les expressions des deux coefficients réels et .
Correction
La solution particulière recherchée, notée , de l'équation différentielle proposée, sera choisie de la forme suivante :
Avec et qui sont deux nombres réels. Ainsi :
Et aussi :
Donc, en remplaçant dans l'équation différentielle originelle, on obtient :
Soit encore :
D'où :
On obtient alors le système suivant :
Ainsi, on en déduit que :
On a alors :
Soit encore :
Ce qui nous donne :
Ainsi :
On en déduit alors que :
En simplifiant:
Dès lors, l'expression de devient :
En factorisant :
Avec et qui sont deux nombres réels. Ainsi :
Et aussi :
Donc, en remplaçant dans l'équation différentielle originelle, on obtient :
Soit encore :
D'où :
On obtient alors le système suivant :
Ainsi, on en déduit que :
On a alors :
Soit encore :
Ce qui nous donne :
Ainsi :
On en déduit alors que :
En simplifiant:
Dès lors, l'expression de devient :
En factorisant :
Question 5
Donner alors l'expression de la solution mathématique globale ainsi recherchée.
Correction
L'expression de la solution mathématique globale est donc donnée par :
A savoir, avec :
A savoir, avec :
Question 6
A l'aide des deux proposées, déterminer l'expression de la solution physique qui décrit le comportement oscillant réel de .
Correction
Les deux conditions initiales proposées sont :
Or, on a :
Soit encore :
La première des deux conditions initiales nous donne :
Ce qui nous conduit à l'expression de :
Maintenant, déterminons l'expression de la dérivée première temporelle . On a alors :
Posons maintenant , on obtient alors :
Soit encore :
Mais également :
Ainsi, la seconde condition initiale nous donne :
Ce qui nous permet d'écrire que :
Soit :
Donc :
Ce qui nous donne :
On aboutit alors à :
Finalement :
Donc, la solution qui satisfait à notre problème de est donc donnée par :
En factorisant, on obtient :
Finalement, on trouve que :
Or, on a :
Soit encore :
La première des deux conditions initiales nous donne :
Ce qui nous conduit à l'expression de :
Maintenant, déterminons l'expression de la dérivée première temporelle . On a alors :
Posons maintenant , on obtient alors :
Soit encore :
Mais également :
Ainsi, la seconde condition initiale nous donne :
Ce qui nous permet d'écrire que :
Soit :
Donc :
Ce qui nous donne :
On aboutit alors à :
Finalement :
Donc, la solution qui satisfait à notre problème de est donc donnée par :
En factorisant, on obtient :
Finalement, on trouve que :
Question 7
On note par une quantité qui à les dimension d'un temps, et qui caractérise le comportement oscillatoire de . Cette quantité s'appelle la " de . Est-il possible, et pourquoi, de définir par la relation ?
Correction
Il est de définir par la relation car la solution trouvée précédemment présente des termes trigonométriques d'arc mais aussi d'arc . Ces deux arcs sont, à priori, différents, d'où l'impossibilité de la formule proposée pour .
Question 8
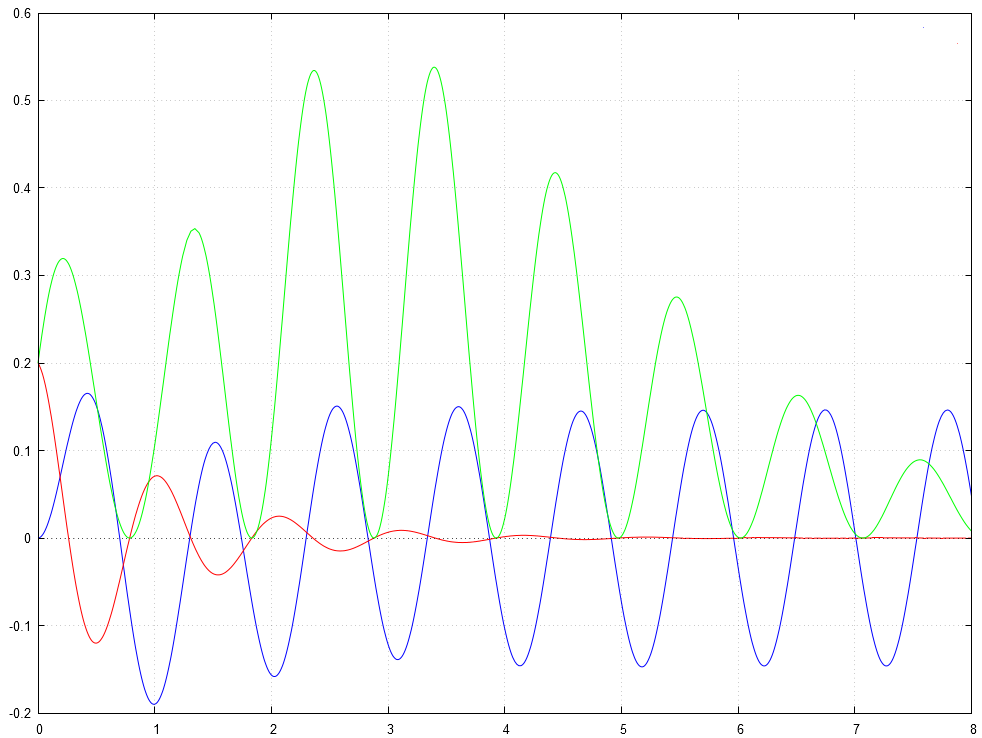
Parmi les trois courbes proposées sur le graphique ci-dessous, pour , laquelle est selon vous celle qui correspond à un comportement physique qui peut être modélisé par les conditions de notre exercice ? Indiquer clairement sa couleur : , ou . Bien évidemment, votre choix sera accompagné d'une claire, argumentée, et sans ambiguïté.
Correction
Seule la solution graphique de couleur bleue satisfait aux deux conditions initiales.
Donc la bonne solution est la courbe de couleur .
Donc la bonne solution est la courbe de couleur .
Signaler une erreur
Aide-nous à améliorer nos contenus en signalant les erreurs ou problèmes que tu penses avoir trouvés.