Matrices et transformations géométriques dans le plan : La rotation - Exercice 3
5 min
20
Question 1
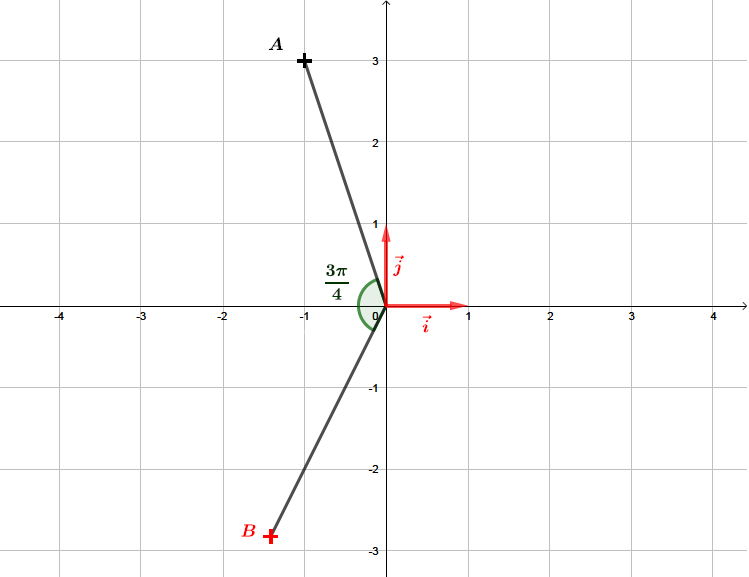
Dans un repère orthonormé direct , on donne le point .
Déterminer les coordonnées du point image du point par la rotation de centre et d'angle .
Déterminer les coordonnées du point image du point par la rotation de centre et d'angle .
Correction
On se place dans un repère orthonormé direct du plan.Soient et deux points du plan . est l'image de par de centre et d'angle si et seulement si
La matrice associée à la rotation de centre et d'angle est : Nous appliquons la formule du rappel, il vient alors que :
Ainsi :
Les coordonnées du point image du point par la rotation de centre et d'angle sont
Signaler une erreur
Aide-nous à améliorer nos contenus en signalant les erreurs ou problèmes que tu penses avoir trouvés.