Sous forme de petits problèmes - Exercice 4
30 min
50
Si un polygone à coté est régulier , alors la mesure de chaque angle au centre interceptant un côté du polygone est égale à en radians.
est un hexagone de centre dont la représentation est donnée ci-dessous : 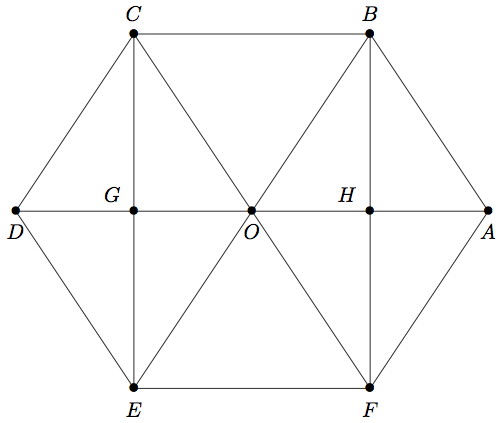
Dans notre cas, nous avons un hexagone, cela signifie par exemple que l'angle orienté mesure c'est à dire ou encore que l'angle orienté .
Déterminer la mesure principale des angles orientés suivants :Question 1
Correction
Soient les vecteurs , et on a alors : .
Il s'agit de la relation de Chasles.
Il s'agit de la relation de Chasles.
Soient les vecteurs et on a alors :
D'après la relation de Chasles, on a :Ici les angles orientés et sont dans le sens indirect.
Ainsi :
Question 2
Correction
Soient les vecteurs et on a alors :
Les vecteurs et sont égaux. On peut donc écrire que :. Ici l'angle orienté est dans le sens direct.
Ainsi :
Question 3
Correction
Soient deux vecteurs et .
Les vecteurs et sont colinéaires et de sens opposés. Ainsi : - Si les vecteurs et sont colinéaires et de même sens alors l'angle orienté
- Si les vecteurs et sont colinéaires et de sens opposés alors l'angle orienté
.
Question 4
Correction
Soient les vecteurs et et et deux réels. On a alors :
D'après la représentation graphique, on vérifie facilement que . On peut donc écrire que :Soient les vecteurs et on a alors :
. Ici l'angle orienté est dans le sens direct.
. Ce n'est pas une mesure principale, on va retrancher , cela nous donne donc :
Ainsi :
.
Question 5
Correction
Les vecteurs et sont égaux. On peut donc écrire que :
Or : . Ici les angles orientés et sont dans le sens indirect.
Ainsi :
Finalement :
Soient les vecteurs et on a alors :
Or : . Ici les angles orientés et sont dans le sens indirect.
Ainsi :
Finalement :
.
Signaler une erreur
Aide-nous à améliorer nos contenus en signalant les erreurs ou problèmes que tu penses avoir trouvés.